基于DJYOS的UART驱动编写指导手册
1.概述
DJYOS设计通用的串口驱动模型,在此模型的基础上,移植到不同硬件平台时,只需提供若干硬件操作函数,即可完成串口驱动开发,使开发工作变得简单而快速执行效率高。
DJYOS源代码都有特定的存放位置,
建议文件路径:在eclipse工程中的目录中为:
src->OS_code->bsp->cpudrv->src->cpu_peri_uart.c。
相应的头文件目录为:
src->OS_code->bsp->cpudrv-> src->cpu_peri_uart.h。
在文件系统(硬盘)中的目录结构是:
djysrc\bsp\cpudrv\cpu_name\src\cpu_peri_uart.c。
如果UART为CPU所在板件的板级外设,则
建议文件路径:在eclipse工程中的目录中为:
src->OS_code->bsp->boarddrv->src->chip_name.c。
相应的头文件目录为:
src->OS_code->bsp-> boarddrv -> src-> chip_name.h。
在文件系统(硬盘)中的目录结构是:
djysrc\bsp \chipdrv\chip_name\chip_name.c。
本指导手册简明扼要的介绍了都江堰操作系统的UART驱动模型,着重讲解了在此驱动架构下编写具体UART控制芯片的驱动编写方法。
2.驱动架构
UART驱动架构如图 21所示。该模型包括通用设备驱动driver.c及 UART通用层uart.c及底层硬件驱动部分cpu_peri_uart.c。它具有明显分层结构,顶层是应用程序,它通过访问设备驱动接口层访问串口通用接层;串口通用层是底层驱动与设备驱动之间桥梁,它调用了若干钩子函数,通过钩子函数间接访问实现串口收发。最下面一层是由BSP设计者提供的硬件驱动,BSP设计者只需要按照要求实现钩子函数。
BSP驱动程序人员的工作是编写图 21中底层驱动部分代码,它是根据具体UART控制器(即不同的CPU)实现与硬件相关的UART寄存器级别的操作。
驱动编写的主要工作,是:
1、初始化uart硬件。
2、实现3个回调函数。
3、若使用中断,则还要实现中断服务函数。
4、若printk使用uart(绝大多数情况是这样),则要实现PutChark、Putsk、GetChark、Getsk这几个函数。
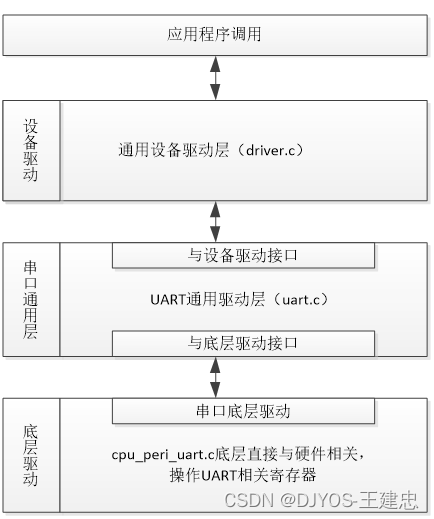
图 2-1UART驱动架构图
3.UART驱动接口
3.1.初始化函数
3.1.1.Step1:初始化硬件
1、包括默认的参数配置,如IO、波特率、停止位、奇偶校验位等;
2、挂载UART中断到中断系统,并配置UART的中断类型,如配置为异步信号;
3.1.2.Step2:初始化参数结构体
UART初始化参数数据类型为truct tagUartParam,初始化该数据类型变量的成员,并调用函数UART_InstallPort(),注册UART为设备,并将它添加到资源列表。
对该函数的参数struct tagUartParam作如说明。
代码 3-1 UART参数初始化结构体
// 串口模块初始化结构体
struct tagUartParam
{
const char *Name; //UART名称,如UART0
u32 TxRingBufLen; //发送缓冲区配置字节数
u32 RxRingBufLen; //接收缓冲区配置字节数
u32 Baud; //默认的波特率
ptu32_t UartPortTag; //UART私有标签,如寄存器基址
UartStartSend StartSend; //启动发送回调函数指针
UartDirectSend DirectlySend; //直接轮询发送回调函数指针
UartControl UartCtrl; //控制函数回调函数指针
};
DJYOS通用驱动架构是先将用户发送数据保存到发送环形缓冲区,然后通过操作系统的通信方式(如信号量通信)通知驱动层将发送环形缓冲区中的数据写入UART控制器的发送寄存器;同理,驱动接收到的数据缓存到接收环形缓冲区,然后通知应用层读取接收环形缓冲区数据。
发送和接收缓冲区的初始化由UART_InstallPort()完成,BSP驱动编程人员只需配置struct tagUartParam中的参数TxRingBufLen和RxRingBufLen,它们分别是配置发送和接收缓冲区的字节长度。此外,UartPortTag为私有标签,对于UART,需赋值为UART控制器的寄存器基址。
UART三个回调函数参数的原型如所示,其中PrivateTag就是结构体中UART的私有标签,寄存器基址。
代码 3-2 UART回调函数类型定义
typedef u32 (* UartStartSend)(ptu32_t PrivateTag,u32 timeout);
typedef u32 (* UartDirectSend)(ptu32_t PrivateTag,u8 *send_buf,u32 len,u32 timeout);
typedef ptu32_t (*UartControl)(ptu32_t PrivateTag,u32 cmd, u32 data1,u32 data2);
3.1.3.Step3:挂载设备
挂载设备API函数UART_InstallPort(),该函数完成了如下功能:
1、初始化串口发送或接收所需的信号量或互斥量;
2、动态分配发送和接收数据的环形缓冲区空间,并初始化环形缓冲区;
3、动态分配UART的控制块UCB,并将UART添加为通用设备(即driver);
4、操作成功,则返回UCB指针,否则,返回NULL。
值得注意的是,UART驱动编程人员对添加串口设备的函数返回值的判断是极其重要的步骤,并将有效的返回值保存为静态变量。如所示,UART_Param是已经初始化好的参数结构类型,pUartCB是定义在C文件中类型为static struct tagUartCB *的静态变量数组,UART_InstallPort()返回值保存到该静态变量。
代码 3-3 添加串口设备
pUartCB[serial_no] = UART_InstallPort(&UART_Param);
if( pUartCB[serial_no] == NULL)
return 0;
else
return 1;
3.2.回调函数
DJYOS的UART驱动架构采用注册回调函数的方式,能有效的将串口通用层和硬件驱动层分开,实现模块化编程。本章将对回调函数的编程要求进行详细的说明,它们是BSP驱动开发人员应该着重关心的部分。
3.2.1.启动发送
static u32 __UART_SendStart (tagUartReg *Reg,u32 Timeout)
参数:
Reg:UART控制寄存器基址。
Timeout:超时时间,单位us。
返回:发送字节数。
说明:该函数的关键在于启动发送功能,如触发发送中断,在中断实现发送数据的功能。比较通用的方法是填写FIFO深度的数据,触发发送中断,部分UART控制器能够实现不发送数据仍然能触发发送中断的功能,该函数将得到进一步的简化。
部分核心示例代码如代码 34所示,调用UART_PortRead读取发送环形缓冲区数据,数据大小为FIFO深度的字节数,并填写到FIFO,然后使能中断。注意,若启动发送时UART硬件缓冲区非空,则无须发送触发发送中断。
代码 3-4 启动发送
__UART_TxIntDisable(Reg);
if(__UART_TxTranEmpty(Reg))
{
fifodep = UART_PortRead(pUartCB[port],ch,fifodep,0);//读FIFO大小数据
for(num = 0; num < fifodep; num++)
{
Reg->D = ch[num];
}
}
__UART_TxIntEnable(Reg);
3.2.2.直接发送
static u32 __UART_SendDirectly(tagUartReg *Reg,u8 *SendBuf,u32 Len,u32 Timeout)
参数:
Reg:UART控制寄存器基址。
SendBuf: 发送数据缓冲地址。
Len:发送字节数。
Timeout:超时时间,单位us。
返回:发送字节数。
说明:串口轮询发送的功能,主要实现操作系统未启动时的串口发送功能。由于轮询发送是比较耗时的发送方式,因此,有必要对发送过程进行超时处理,同时,发送过程必须关闭中断。
部分核心示例代码如代码 35所示,判断发送缓冲区为空后,往硬件发送寄存器中写数据,直到发送完成,若等待超时,则退出循环。发送过程必须关闭中断。
代码 3-5 轮询发送
__UART_TxIntDisable(Reg);
for(result=0; result < len; result ++)
{
// 超时或者发送缓冲为空时退出
while((false == __UART_TxTranEmpty(Reg))&& (timeout > 0))
{
timeout--;
Djy_DelayUs(1);
}
if(timeout == 0)
break;
Reg->D = send_buf[result];
}
__UART_TxIntEnable(Reg);
3.2.3.控制函数
static ptu32_t __UART_Ctrl(tagUartReg *Reg,u32 Cmd, u32 Data1,u32 Data2)
参数:
Reg:UART控制寄存器基址。
Cmd:串口命令字,参见源码uart.h头文件定义。
Data1、Data2:含义依Cmd而定。
返回:0,执行成功,其他,自定义。
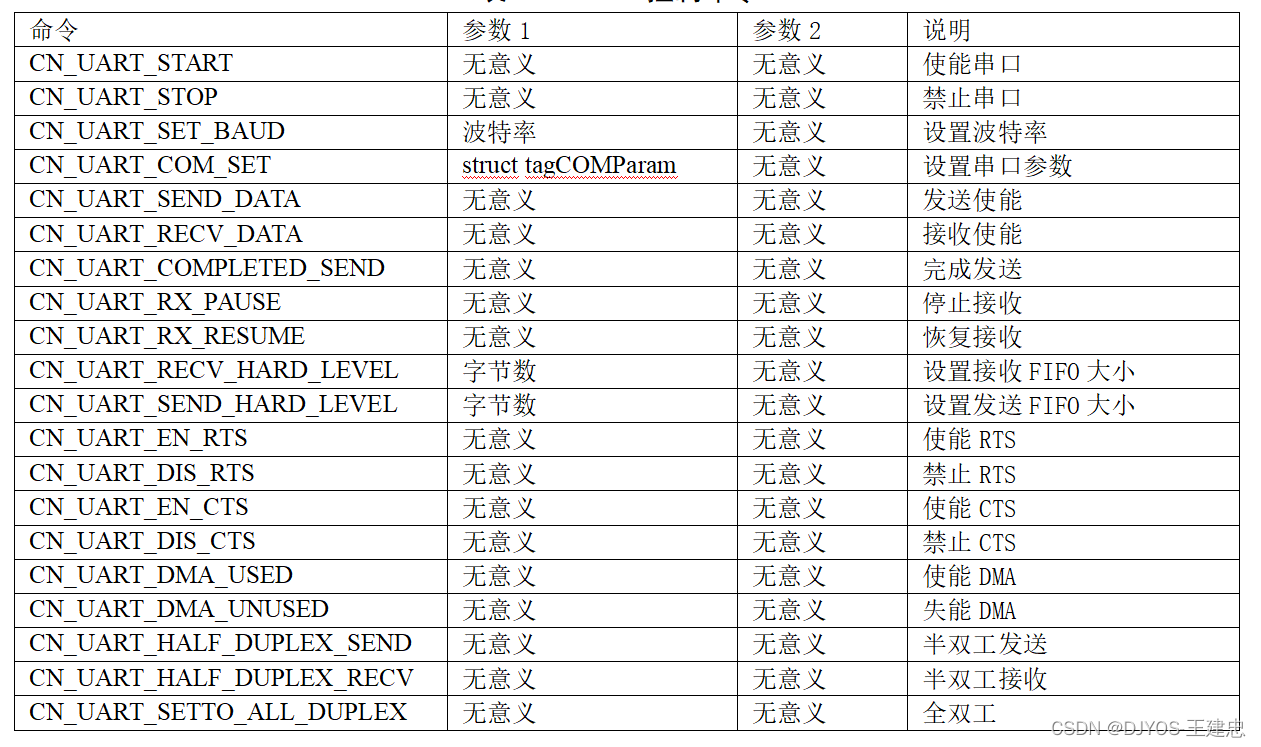
说明:底层驱动的控制函数主要完成与具体硬件相关的控制功能,如设置波特率、配置串口参数、暂停启动串口等。UART控制命令及参数说明如表 3-1所示,需要注意,并非所有的命令都需要用到,驱动编程人员须根据实际情况选择使用的命令。
表 3-1 UART控制命令
3.3.中断函数
因为采用中断的方式收发数据效率更高,对CPU的消耗低,所以建议驱动编写人员采用中断的方式实现UART的收发。
首先,必须将UART的中断号添加到critical文件夹下面的C文件critical.c中tg_IntUsed数组,使中断系统初始化时,将对应的UART中断号添加到中断系统中;其次,UART初始化时,配置UART中断类型和触发条件等。最后,完成中断服务函数UART_ISR。
3.3.1.中断实现过程
比较典型的UART中断函数实现过程如图 31所示。
在中断服务函数内部,通过读中断标志位判断中断类型,并进入不同的处理过程。接收中断时,将接收数据写入接收缓冲区;发送中断表示当前硬件FIFO中数据已经发送完成,则继续读发送缓冲区数据,直至发送结束;帧错误中断是指发生了校验、帧格式或起始结束位错误时的中断。无论是发送还是接收中断,都需要注意清中断标志位。
图 31 UART中断流程图
3.3.2.注意事项
中断服务函数的实现过程因UART控制器的不同,处理情况也有所差异,列出如下注意事项,以供参考。
1、中断服务函数中要注意通过判断中断标志来区分中断类型,并及时清中断标志;
2、中断类型为发送中断时,UART_PortRead()返回为0,则表示发送环形缓冲区中无数据,建议关闭发送中断;
3、帧错误处理方式由应用程序通过Ctrl函数注册,登记发生错误时弹出的事件。
4.移植建议
由于大部分的UART控制器的设计基本相似,因此,BSP程序人员可采取下面的步骤快速的完成DJYOS驱动架构下UART底层驱动的开发。
1、拷贝其他工程已测试通过的UART驱动文件cpu_peri_uart.c/cpu_peri_uart.h;
2、添加UART的中断号到critical.c文件下面tg_IntUsed数组;
3、修改cpu_peri_uart.c/cpu_peri_uart.h中与具体UART寄存器相关的部分;
4、实现中断收发数据,并测试通过。